Glonass SDR
Summary
Project Goal
The main goal of this project is to provide a fully functional implementation of a GNSS receiver working with GLONASS L1 SP signals, delivering RINEX files and an on-the-fly navigation solution. In order to achieve it, the acquisition and tracking blocks were implemented in GNSS-SDR. The following picture shows a generic software GNSS receiver.

Introduction
The GNSS-SDR project is an open-source GNSS software-defined receiver. It is currently working with GPS and Galileo systems. An addition was proposed aiming to enhance performance and availability: add the Glonass system into the receiver, the Russian counterpart of GPS and Galileo.
The GNSS-SDR can be a testbed for the GNSS community, given that it already has many features implemented, as configurable signal sources and several signal processing algorithms. These characteristics save time and development effort allowing developers and researchers quickly adding a new feature and making any tests.
This report documents the implementation of the first modules for a Glonass SDR. The GNSS-SDR has five main blocks that go processing the incoming signal, computing the position of the satellites, and estimating the position of the receiver. The first two blocks, Acquisition and Tracking, are the subjects of this report.
Glonass Signal Model
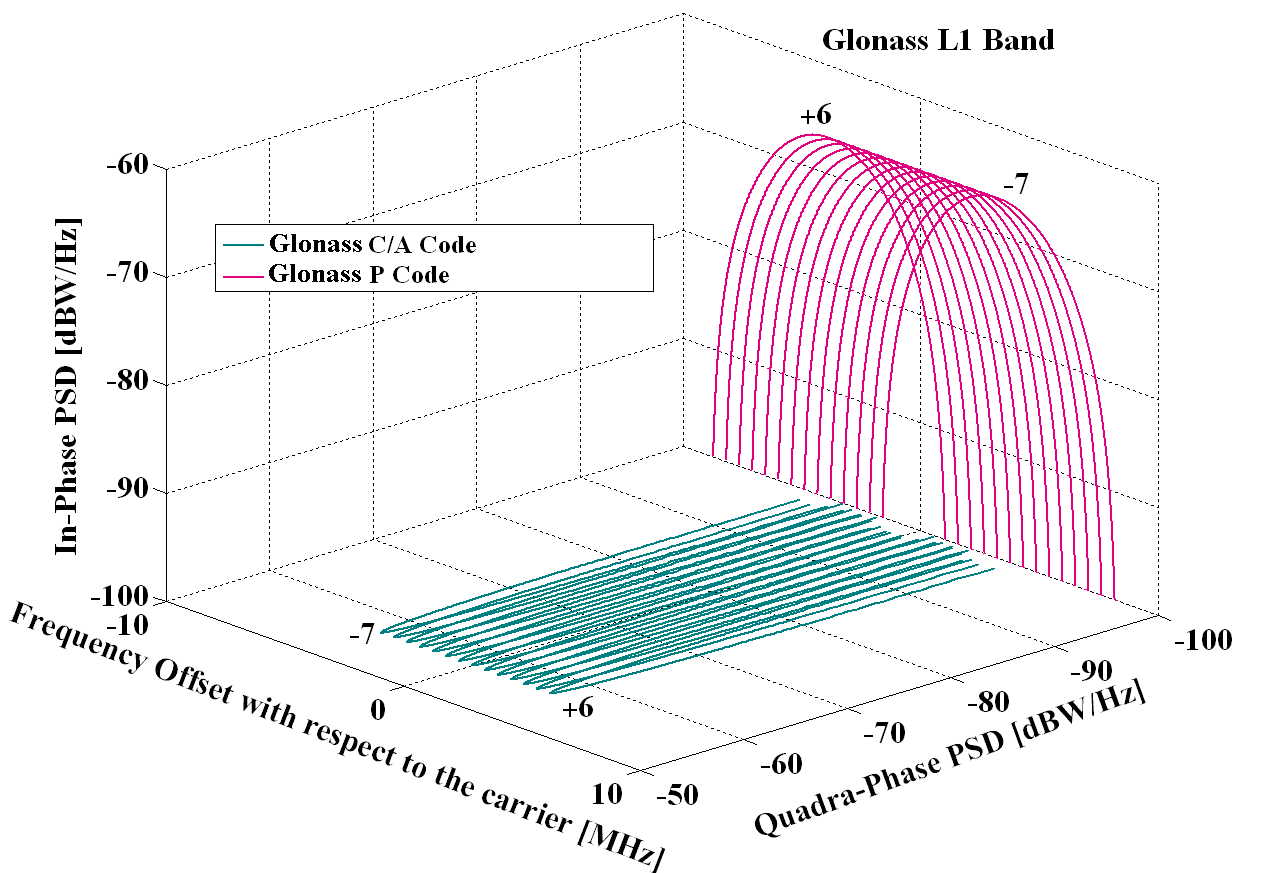
The Glonass constellation has 24 satellites distributed in 3 rough circular orbital planes [2]. These satellites use frequency–division multiple access (FDMA) signal structure, transmitting in two bands:
- \(L_1 = 1602 + K * 0.5625\) MHz
- \(L_2 = 1246 + K * 0.4375\) MHz
Where K = \([-7;6]\) is the channel number. In the L1 band, two signals are transmitted: a standard precision and an obfuscated high precision signal. The FDMA system allows the satellites to send the same PRN code using the BPSK modulation. The below picture shows the spectra of GLONASS signals in L1.
Dataset
The algorithms used in this work were tested against simulated and real signals. The simulated data were firstly generated using a signal simulator built-in Matlab. Another simulator was built for unit tests using the GNSS-SDR signal generator that was expanded to generate Glonass L1 CA signal. The real signal was captured with NT 1065 front end. The total time recorded was of 63 seconds. The capture was made at University of Colorado Boulder with an antenna on position 40.007986, -105.262706 on August 31 2016. Mr. Damian Miralles shared this file with the author. For the sake of this report, only the results for real signal are shown.
Acquisition
There are several blocks in GNSS-SDR software that process the signal retrieved from a front end until the data come through to the calculation of the position of receiver. The first block is Acquisition, the purpose of this block is find all the satellites that are visible to the front end’s antenna and discover in which Doppler frequency shift and Code Delay are these satellite signals.

The algorithm used in this work was the Parallel Code Phase Search (PCPS) due to its advantage of using Fourier Transform to search the Code Delay parallelly. The GNSS-SDR already uses this algorithm to acquire GPS and Galileo signals. This implementation was extended to deal with FDMA system, which is the system used by GLONASS satellites. Unit-tests were written for GLONASS PCPS Acquisition following the testing pattern already set by the Mentors.
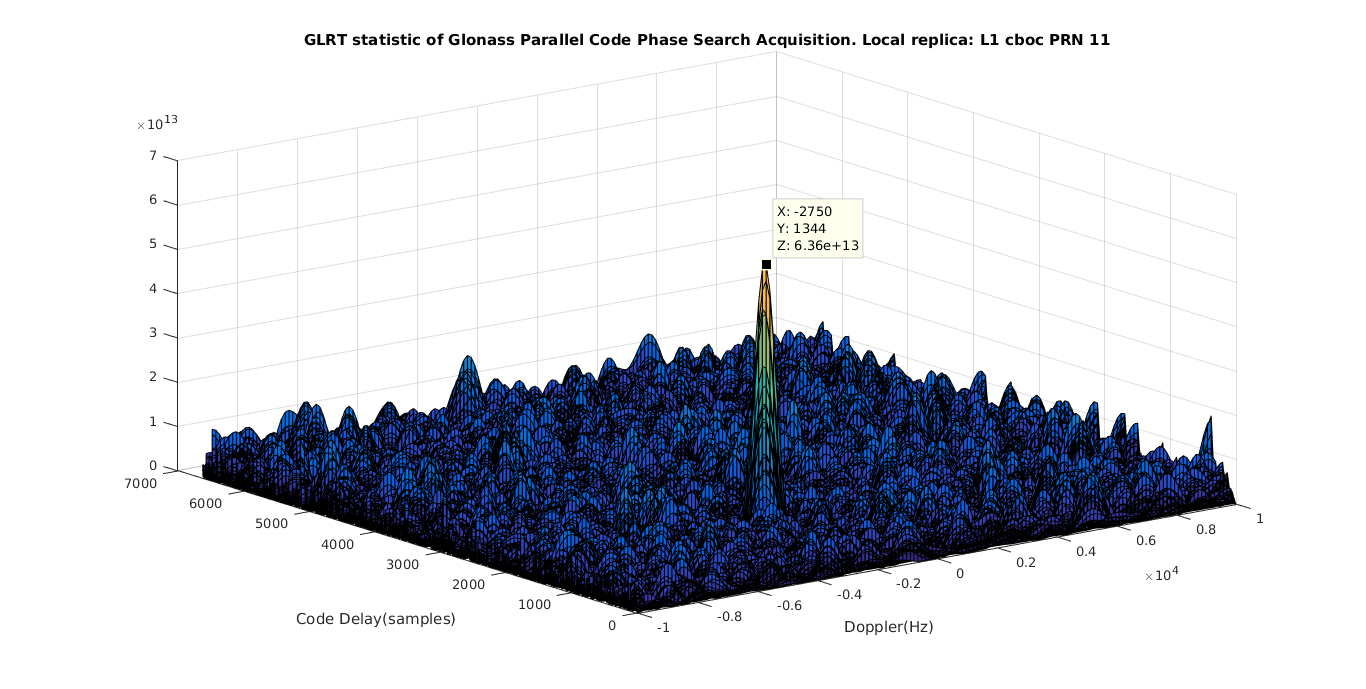
The output for this algorithm is a 2D grid, and its dimensions are doppler frequency and code delay. If a satellite is visible, a significant peak is presented as in the figure below. If a satellite is not visible, there is no significant peak, just noise. A threshold is set to distinguish between them.


Results
As described in the dataset section, a real signal was captured on August 31 2016. Gpredict program can tell that several satellites were visible on this date. For the sake of this report, only two satellites were picked, SV’s 11 and 12. The Figures below show the acquisition plot for each one of these satellites.


These acquisitions were made with 125 Hz of Doppler step. The X-axis is the acquired Doppler shift, and Y-axis is the Code Delay.
Tracking
The Acquisition output is a rough estimation of the Doppler Shift and Code Delay that the satellites signals are suffering. The purpose of the Tracking block is to retrieve the navigation data from those signals. Therefore, the Doppler and Code Delay estimations must be better refined and tracked. Two filters for tracking each one of the properties, doppler, and code delay, were implemented to carry out this work.

The carrier filter implemented is a Costas loop that it’s a Phase Locked Loop insensitive to bit transitions. The discriminator of this filter tries to keep all the energy of the signal in the in-phase arm. The PRN code is tracked with a Delay Locked Loop. The idea behind DLL is to correlate the input signal with three replicas of the code with a spacing of half chip. These replicas are called Early, Prompt, and Late.


For the Doppler, a PLL Costas loop was implemented, furthermore, for the Code Delay, a DLL was implemented. A Carrier-Aided track was also implemented. In this tracking, the Doppler loop aids the code loop reducing the noise in the code loop measurements. As done for the Acquisition, unit-tests were also written for the tracking.
The discriminator used in PLL Costas is the two-quadrant arctan and the discriminator used in DLL Noncoherent Early minus Late envelope normalized discriminator.

Results
After a successful acquisition, the tracking has begun. Both tracking filters must lock the signal and track. The figure below shows the output from no aided loop. In Correlation Results, the Prompt correlators are the highest values showing both carrier and code being tracked and locked.


The raw data can be seen zooming the bits of the navigation message.
Similar figures can be seen for the carrier-aided loop. The main difference between them is the PLL discriminator that is less noisy.


The Story so Far
Here is the breakdown of our major milestones:
- 4f9a6d0 Add pcps acquisition adapter for glonass l1 ca signal.
- b333bb2 Add Glonass L1 C/A channel to the block factory.
- 6307ac2 Add FDMA protocol to pcps algorithm.
- 442656a Add unit-test for glonass pcps acquisition.
- 22da2ad Add adapter for Glonass L1 C/A tracking.
- b69f203 Add gnuradio block for glonass tracking.
- c2e04a2 Add Glonass Tracking block to block factory.
- d95419d Add Glonass C Aid track adapter.
- 8763689 Add Glonass C Aid tracking block to the block factory.
- d3038dd Add unit test for new tracking blocks.
A pull request was made but due to some issues in automatically merge, the code was manually merged into another branch.
Future Work
Toward the GNSS-SDR work properly with GLONASS L1 SP signals, the navigation data must be decoded, which implies calculating the observables and computing the PVT solution. The last two blocks were already implemented in GNSS-SDR by the Mentors for GPS and Galileo. These blocks work with several GNSS systems, including GLONASS. Mr. Damian Miralles implemented a telemetry decoder for Glonass navigation bits and the RINEX printer.
For future work, Acquisition, Tracking, and telemetry block must be tested together with a real signal. This work only tested the first two blocks together. In the current GNSS-SDR implementation, two satellites that are in the same FDMA channel can be acquired simultaneously. This issue occurs because satellites in opposite points of an orbital plane transmit signal in equal frequencies. This issue can cause a channel which has lost a satellite beginning to track another satellite with the same ID or even the same satellite under a different ID.
Acknowledgements
I want to thank my mentors that guided me through this work, providing me support and feedback. I would also like to acknowledge them for the well documented and clear software provided. That clearness saved me tremendous amounts of time on my implementations. I have obtained extensive experience towards signal processing and software testing with the present work.
A massive thank to Mr. Damian Miralles that provided me a file with real GLONASS signal, only with this, I was able to test my work with real noisy input. Moreover, I am glad that it worked!
Last but not least, I would like to thank Google for providing me such experience. This work allowed me to explore more in-depth the community of open-source software and to realize it’s true potential about spreading and sharing knowledge with the whole world.
Bibliography
[1] K. Borre, Software-defined GPS, and Galileo receiver: a single-frequency approach. Boston: Birkhhäuser, 2007.
[2] GLONASS ICD, 1998. Technical report. v.4.0.
[3] B. Hofmann-Wellenhof, H. Lichtenegger, and E. Wasle, GNSS–global navigation satellite systems GPS, GLONASS, Galileo, and more. Wien: Springer, 2008.
[4] E. D. Kaplan and C. Hegarty, Understanding GPS: principles and applications. Norwood: Artech House, 2006.